第3回ROS勉強会
第3回ROS勉強会が8月30日に開催され、僕も急遽発表することになりました。今回は第4回ROS勉強会で予定されている第2回NEXTAGEハッカソンに向けて、ROSのtfとカメラパッケージについてNEXTAGE OPENを例に取りながら紹介しています。2時間の発表で時間が余ってしまうか心配でしたが、実際にその場でソースコードを解説したり、プログラミングしたり、質疑応答したりしているうちにあっという間に時間は過ぎ、むしろ最後の方は押せ押せになってしまいました。
目次だけこちらに転載しておきます。tfについては公式チュートリアルを元に学習を進め、カメラパッケージに関しては実際にWebカメラを使ってデモしながらさまざまなパッケージを紹介しました。
tf
- 公式チュートリアルの学習
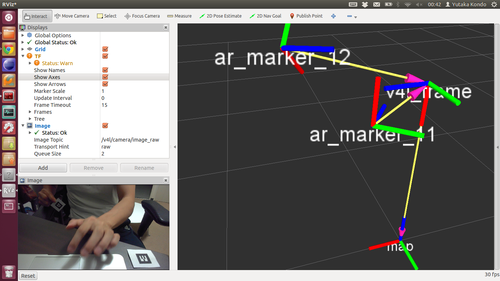
RVizを使った可視化
カメラパッケージ
gscam:UVC(Webカメラ)ドライバcamera_calibration:カメラのキャリブレーションcv_bridge:ROS OpenCVの画像変換ar_track_alvar:ARマーカ認識ueye_cam:NEXTAGEの頭部・ハンドカメラドライバ
特にARマーカ認識を行うar_track_alvarはすごく良く出来ているので、一度手元でお試しあれ。
僕の前に発表した @DaikiMaekawa さんの発表資料もWebにアップされています。MoveIt!のPythonインタフェースを使って、ロボットを動かすノウハウが詳細にまとめられています。
http://www.slideshare.net/DaikiMaekawa/ros-japan-users-group-meetup-03-38500849
何はともあれ、発表資料作成が無事間に合って良かったです。あと、懇親会でロボット開発企業の中の人の話がたくさん聞ける懇親会も毎回すごく楽しいです。居酒屋でロボット動かしている人初めて見ましたし。皆さんもぜひ懇親会も併せて次回ご参加ください。

カメラパッケージに関しては、もう少しこの勉強記でこれから掘り下げていこうと思います。
This post is licensed under CC BY 4.0 by the author.